In my Physical Computing class for our final we had to create something incorporating the different aspects we learned throughout the year. I chose to make a new iteration of my first project a Ferris Wheel. To make this idea a reality, I took use of the Adafruit Circuit Playground, a continuous servo motor, neopixel ring, potentiometer, and several 3D prints.
For Project 1, I made a Ferris Wheel out of paper, using a Cricut machine. I drew my inspiration from this, however I wanted to make my new iteration much more complex. My goals for my final project was to 3D print the model, make it spin, and have the lights placed more efficiently.
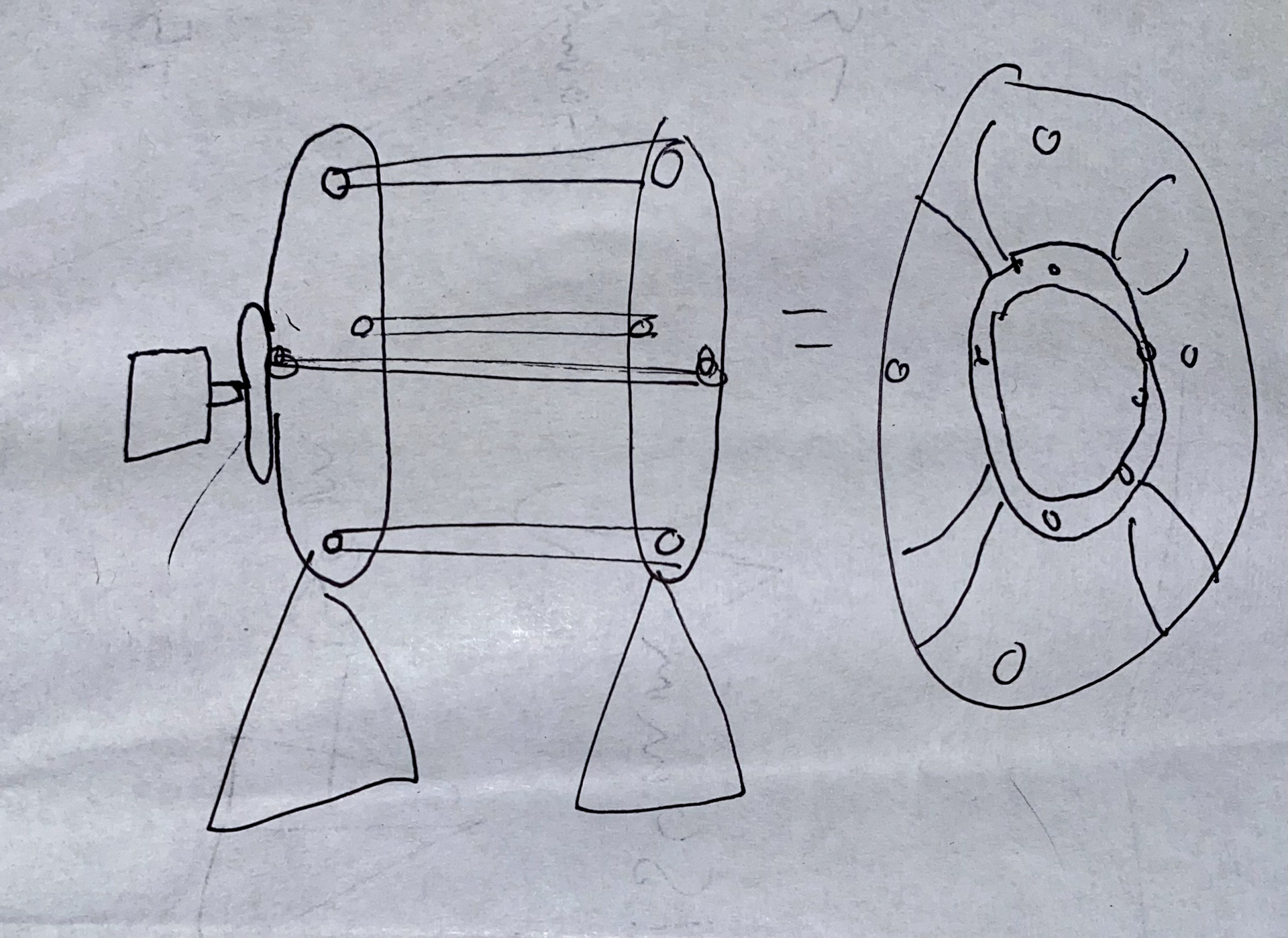
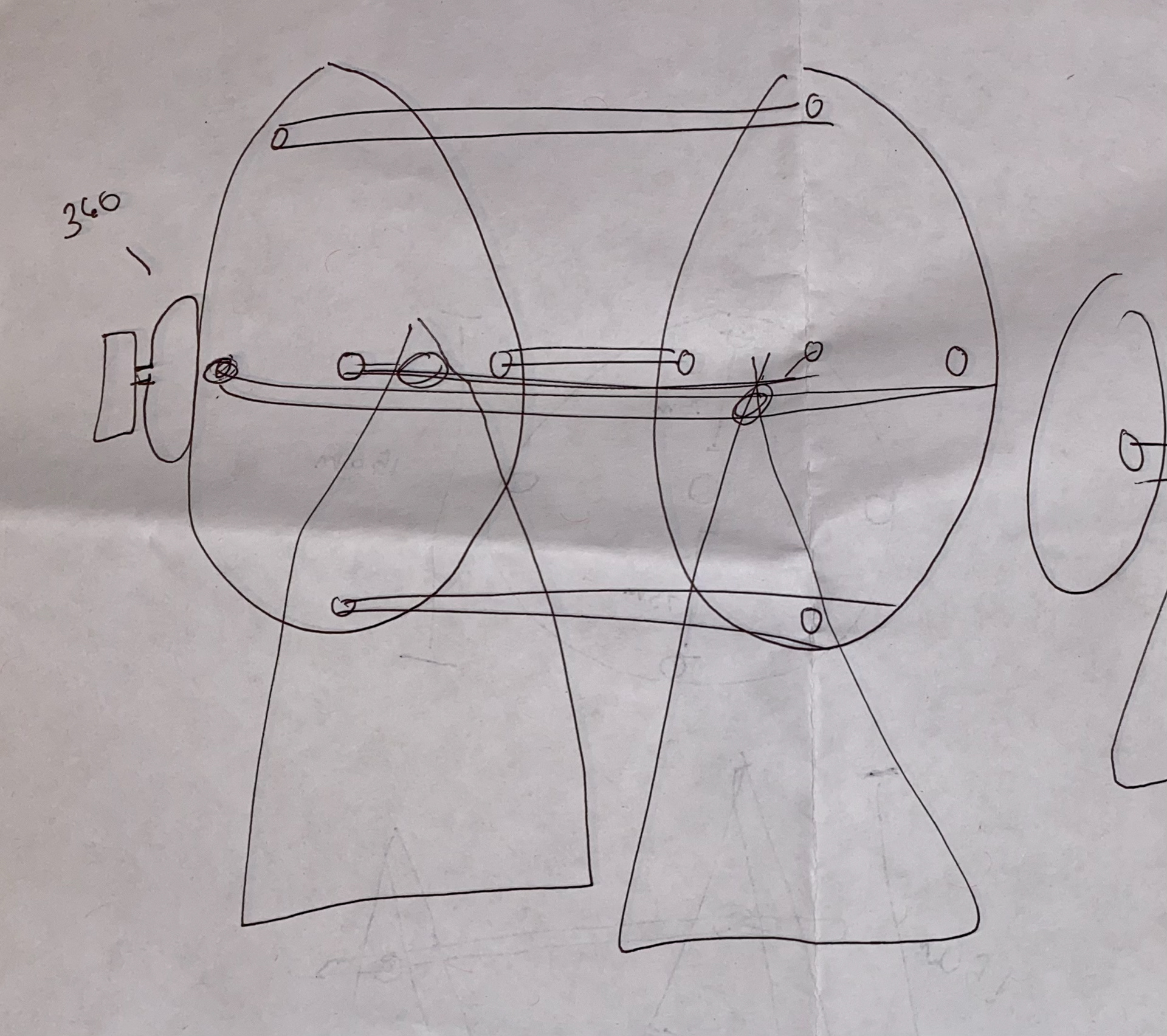
Brainstorming
I began sketching different ways the Ferris Wheel could work. I wanted to attach the servo motor to the middle of the wheel to control the movement from the center. I knew I wanted lights coming from within, and for this project I used a neopixel ring, which allowed me to place it seamlessly in the middle without interfering with any objects.
First Steps
On Etsy I found a 3D print file of a Ferris Wheel from CraftyStl. It contained all the different pieces that would allow the wheel to move.

More 3D prints
I printed out a cap for the servo motor , using a file my professor provided us with
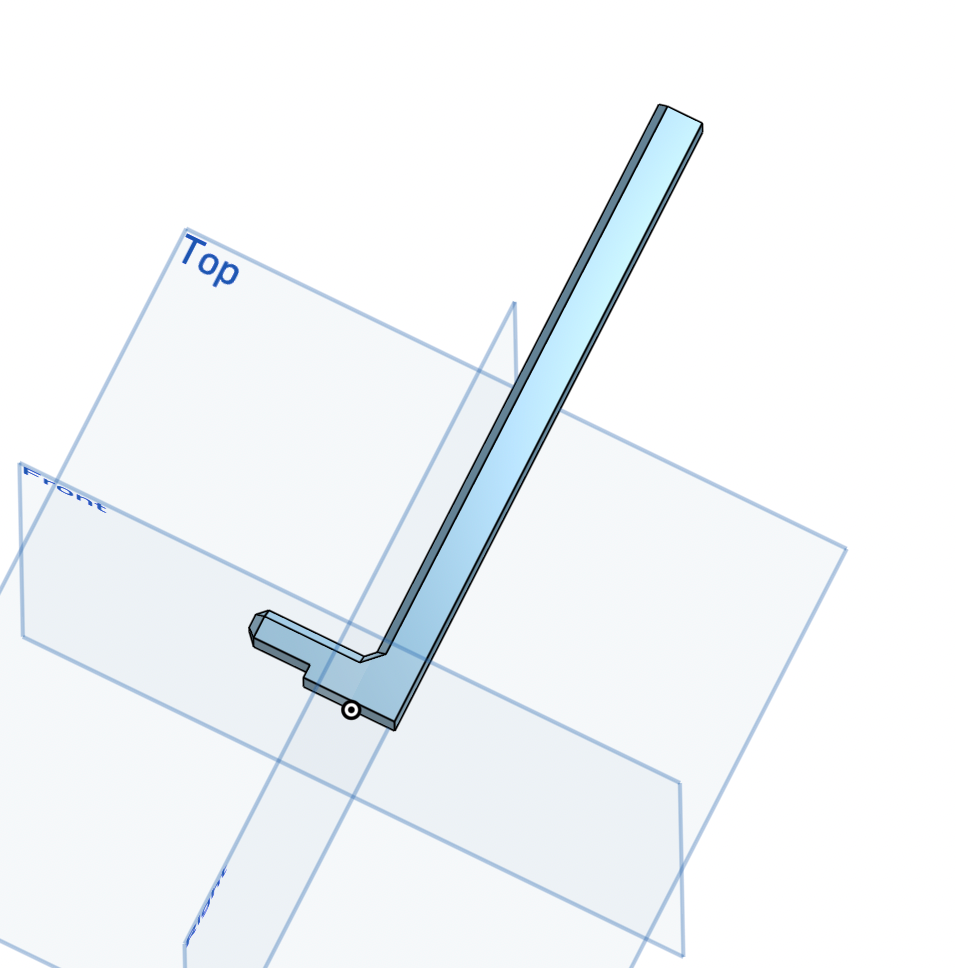
Using the distance from the center of the wheel axle (where the servo motor would be attached) to the bottom of the stand, I created this L shaped stand that would give support to the servo motor, allowing the wheel to spin seamlessly.
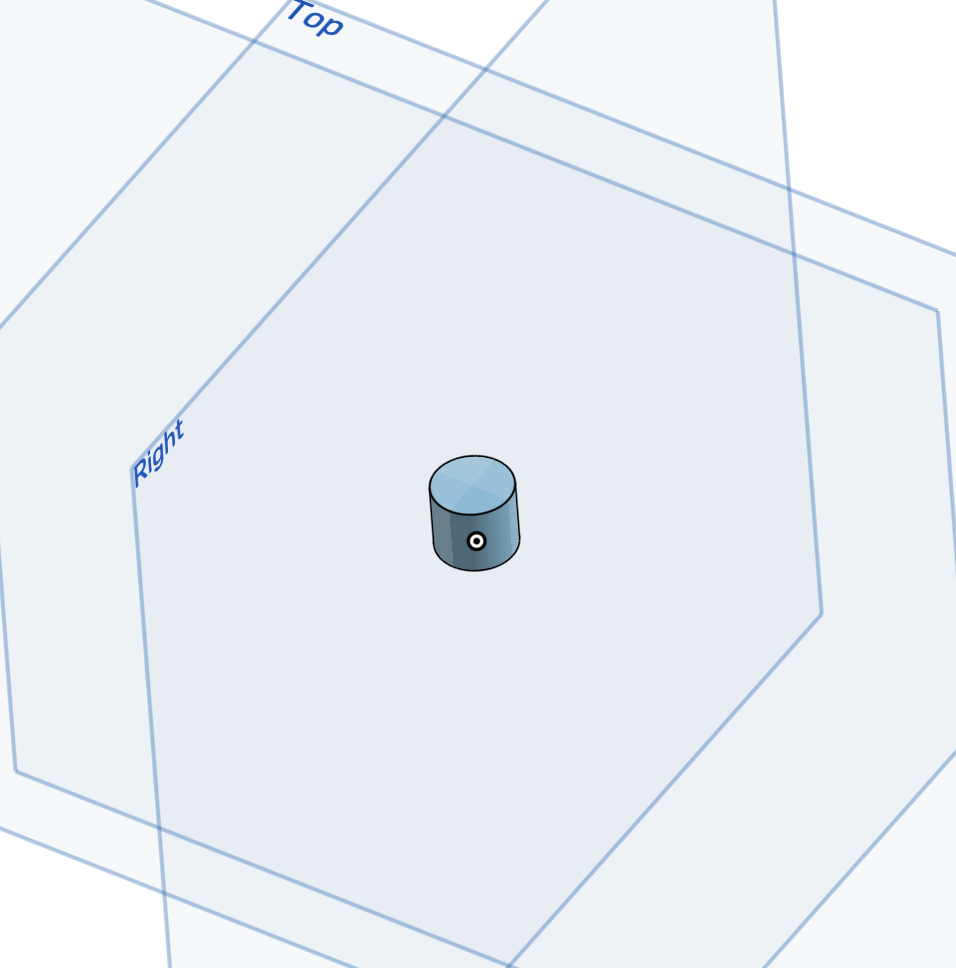
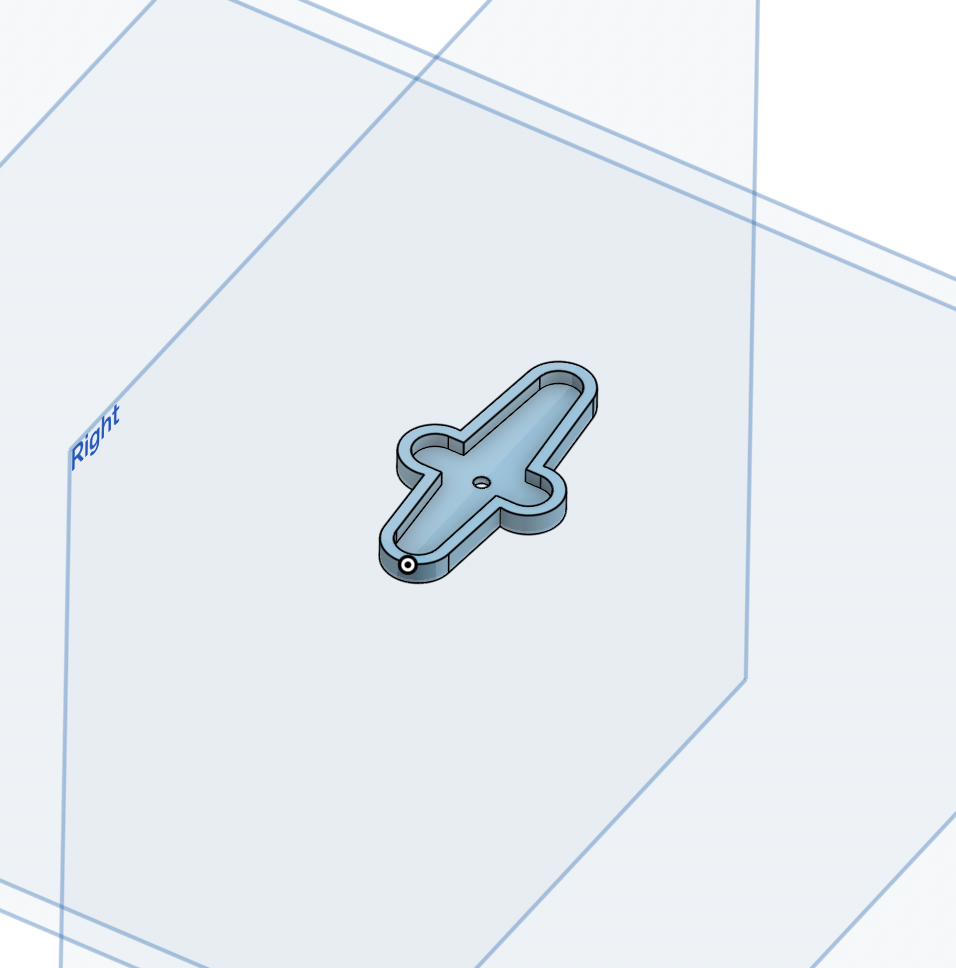
I measured the inner diameter of the axle to create this piece that would stick inside the axle and attach to the servo motor, making the connection that would allow the wheel to spin
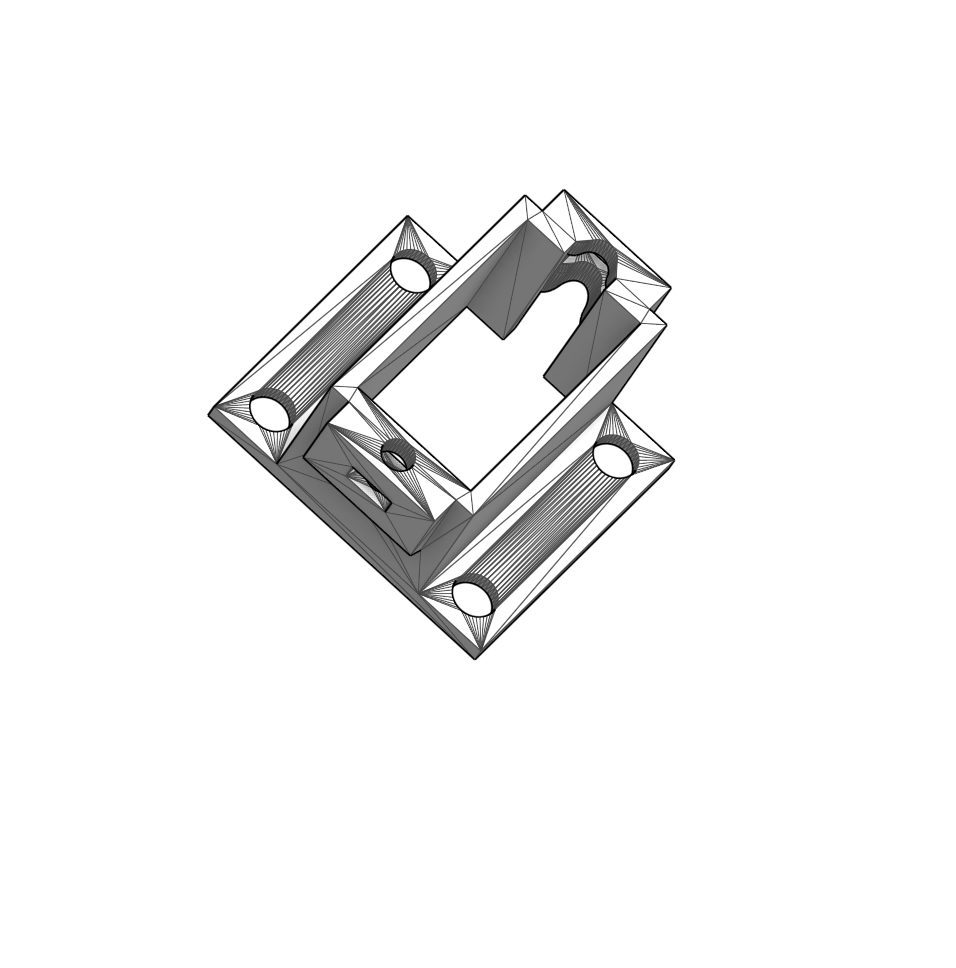
On Cults3D.com I was able to find a servo motor holder that would assist in stabilizing the piece
Making the Code Work
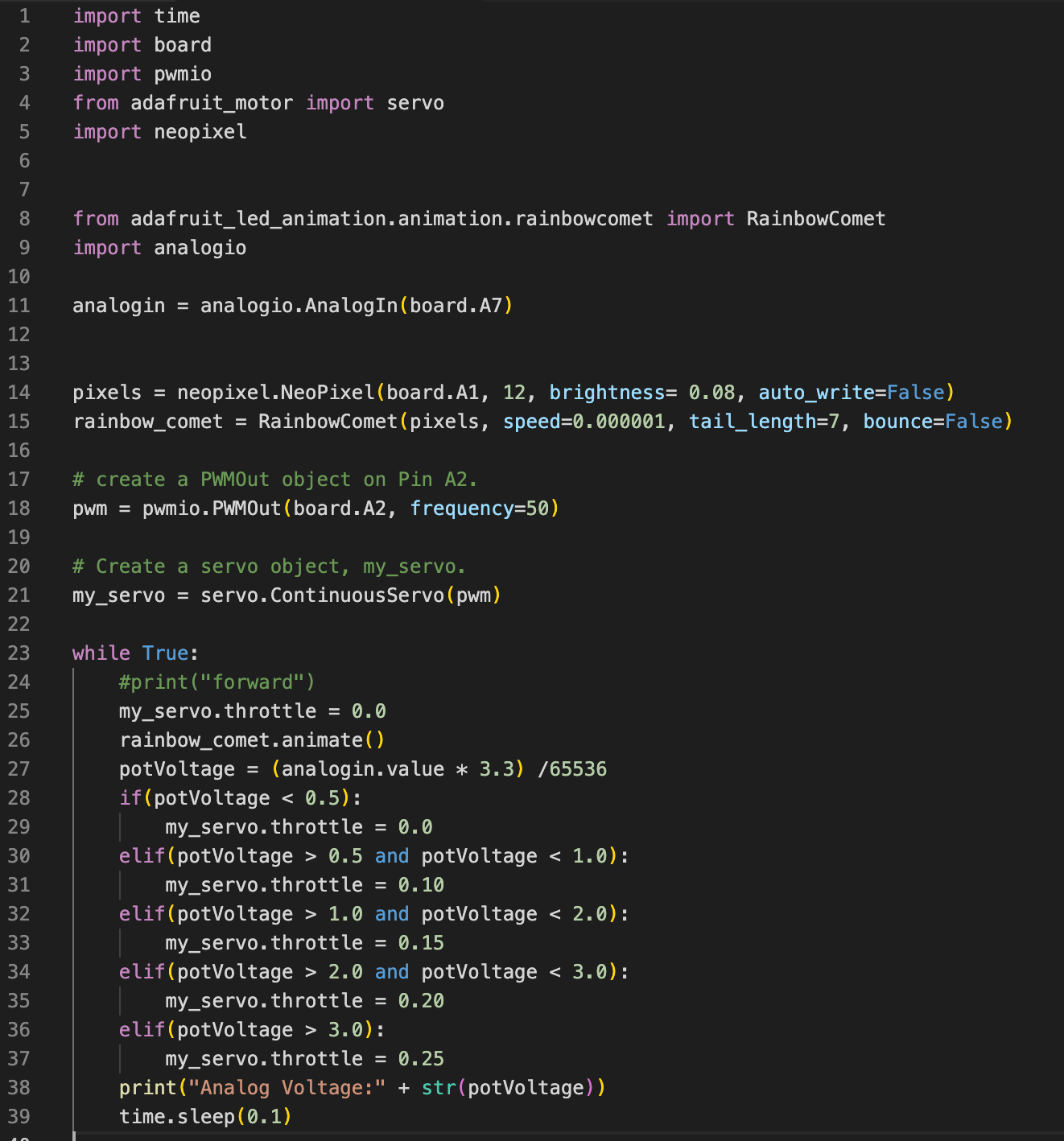
The 3 components I wanted to function were the servo motor, the neopixels, and the potentiometer.
I wanted the potentiometer to control the spinning motion of the servo motor as well as the speed as one played with the voltage.
Using an if statement I set parameters so that as the potentiometer increases in voltage value, the servo motor spins faster according to the set values
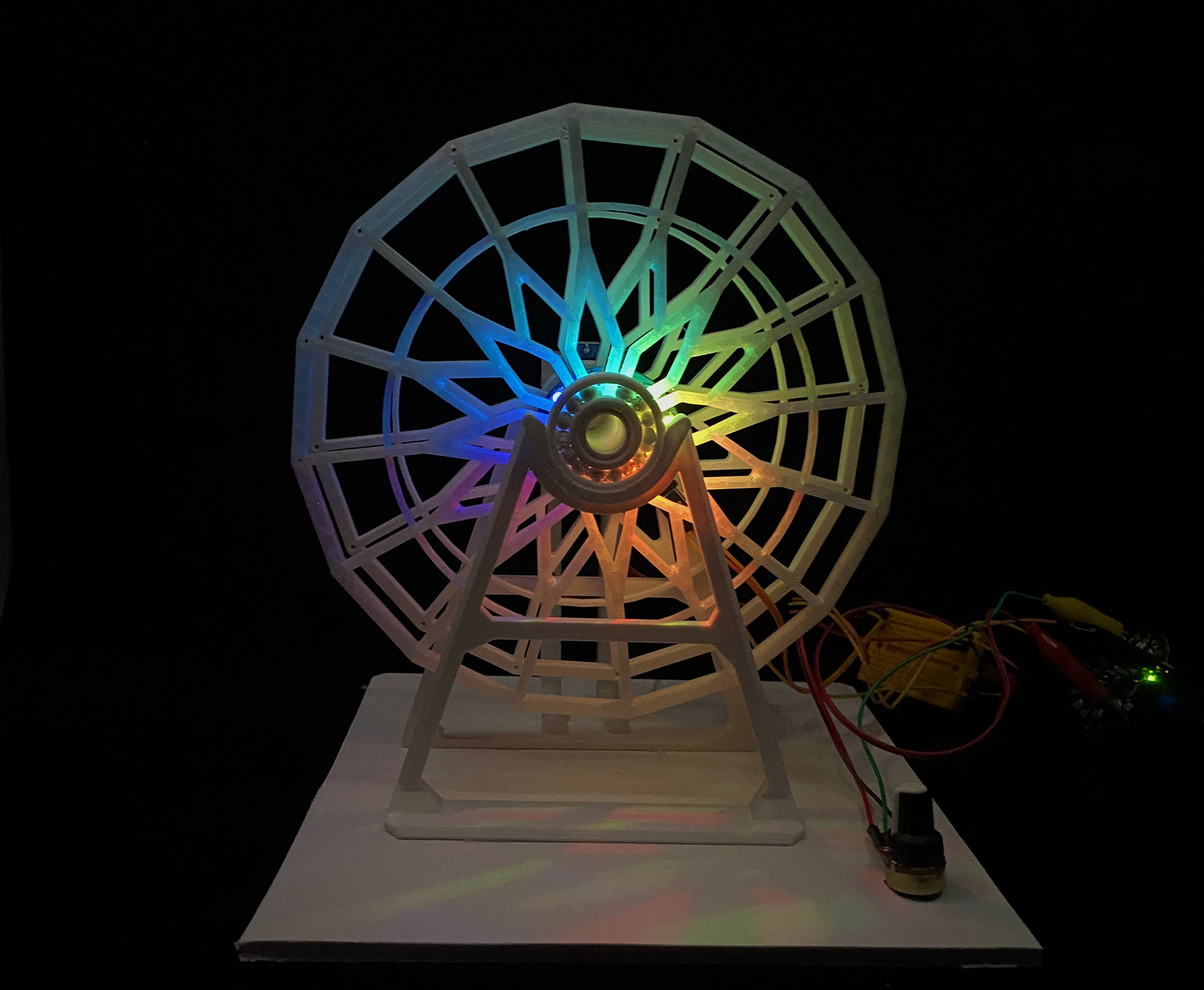
All while this is occurring the neopixel displays a rainbow animation
Assembling the Pieces

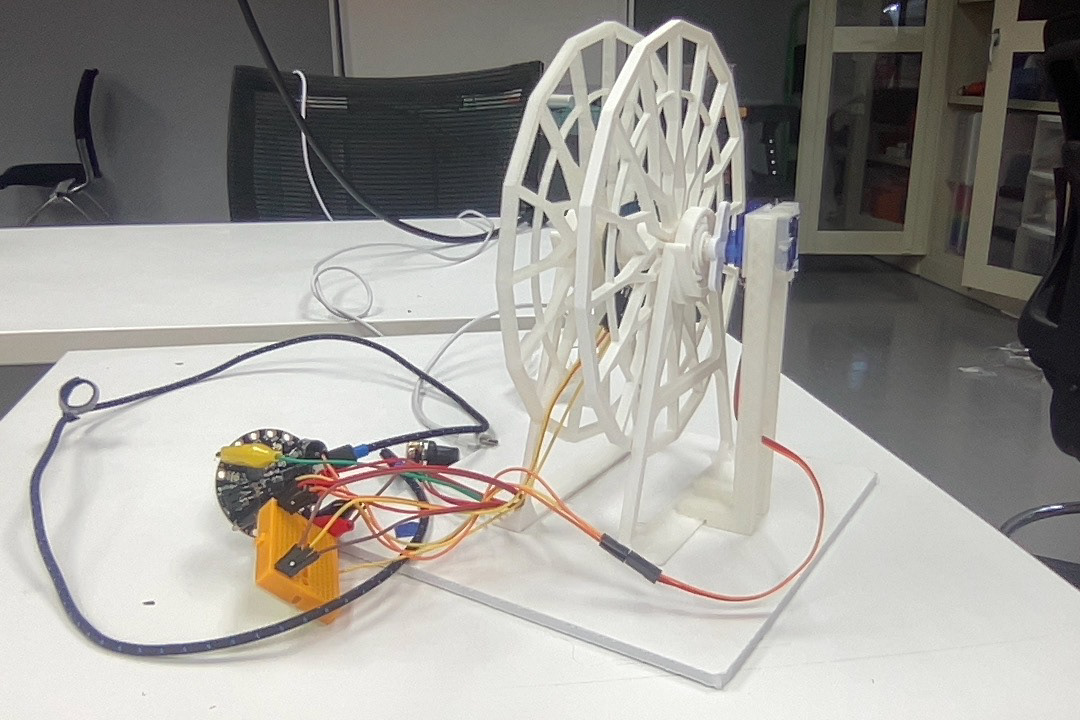
Final Prototype